

A Closer Look at POSE Running
In the running world a “revolutionary” and “controversial” way of running, called POSE, was introduced by Dr. Nicholas Romanov. This approach, known as the POSE method, revolves around the notion that the runner is not actually propelling him- or herself forward, but rather allowing gravity to propel the body forward and changing support from foot to foot—“POSE-fall-pull,” as Romanov states. No more than a controlled fall, this method is in stark contrast to the average runner’s “heel-toe” method of running.
This has brought new attention to recreational and long distance running mechanics, which have devolved over the years since the advent of recreational running and the “innovative” running shoe that has resulted in misinformation. While the POSE method is functional for longer distances, its mechanics fail to meet the demands of sprinting.
Analyzing the Stride
Each stride of a run, whether it is the mile or the 100 meter dash, has three components: the support, the drive, and the recovery phase. All three phases occur within fractions of seconds and in quick, fluid succession.
In the support phase, one leg begins contact with the ground from the ball of the foot while the other is free and behind the body. The leg that is in contact with the ground remains underneath or slightly ahead of the center of gravity (COG) and flexes as it bears bodyweight, initiating a stretch-shortening cycle. The free leg is now in the process of swinging forward and the drive phase begins. The contact foot has now been loaded like a spring in the support phase and begins to extend from the ankles, knees, and hips. This action propels the body forward. The free leg, at the same time, is swung forward in order to add to forward propulsion. This push places the runner’s body in the air and there is now no contact with the ground. This completes the drive phase. The recovery phase is when the body is airborne and the legs begin to cycle and change positions. The free leg, which had been driven upward, now begins to “unwind” and make its way down to the ground. Once it makes contact with the ground, the support phase begins all over again. What strides look like will vary from runner to runner and from distance to distance, but the basic components always remain the same.
POSE encourages running economy with its principle mental cues. These principles tell runners to “change support quickly… raise the ankle straight up under the hips… retain the support easily, effortlessly, light… to not try to increase stride length or range of motion to increase speed… to not fix on landing… [and] keep the knees bent on landing.” All of these mental cues aid in achieving proper running mechanics. Many are the same points that track and field coaches use for their athletes.
The first step of the stride is the landing of the foot. Romanov reminds the runner to not fixate on getting the leg back down to the support phase in order to run faster. To run faster, one is covering more ground with each stride, not reaching for the ground ahead (resulting in overstriding). The runner allows the free leg to naturally drop to the ground rather than returning it by mechanical energy. Doing so, the runner prevents himself or herself from stomping the ground. A good runner does not run with “heavy feet,” (caused by actively reaching the ground), but rather the steps are quick and light; there is only a light pitter-pat to each stride. If the foot stomps the ground, tremendous forces are sent upwards through the legs; these forces are much greater than what results if just allowing gravity to bring the foot back down. Also, actively reaching and stomping the ground reduces the hang time of a stride, which reduces the amount of distance covered.
Romanov states that with each stride the foot land—while keeping the knee bent—on the ball of the foot underneath the center of gravity, which is being displaced in a forward direction. Landing on the ball of the foot and under the center of gravity reduces the braking action, keeping the runner in motion. This landing also allows the lower legs to absorb impact much better than heel-toe running—the calf muscles are allowed to flex and absorb force. Landing on the ball of the foot and with flexed knees utilizes the stretch-shortening cycle, unlike heel-toe running, where the leg muscles are already in a stretched position, and must therefore generate more force to “toe off.” The stretch-shortening cycle causes a recoil effect in the leg muscles, and the runner is able to use the body’s natural reflexes in order to contribute power, resulting in more economical movement. The calf and hip muscles strike the ground in a semi-flexed position, immediately stretch, and contract, resulting in momentum forward only if there is a forward lean.
The runner’s COG is displaced forward by leaning slightly from the ankles to facilitate forward motion by placing the runner’s legs at the proper angle to push against the ground. If the lean is not present, the leg drive is straight down and propulsion is upwards. In order to move, the runner must “drag” the body across the ground or bounce, resulting in higher energy expenditure. Think of pushing a car. If you stand completely upright and try to push a car forward it will go nowhere. The body is not in a position to push against the ground or the weight of the car. However, if the body is angled only a few degrees then the legs can effectively push against the ground and move the vehicle.
POSE tells the runner to pull the ankle straight up instead of backwards in a pawing motion. This mental cue results in two things: a more efficient use of hip and knee flexion and a quicker change of support. This quicker change of support is important in running to ensure the entire system (the runner) is in constant motion and never decelerating due to the braking effect of remaining in contact with the ground for too long.
The reason it is more efficient to pull the foot straight up is because the runner performs the knee and hip flexion as one motion rather than as two separate motions. For example, stand on one leg with the free leg extended behind you, ball of the foot lightly touching the floor. Now, as fast as possible kick yourself in the butt and bring your foot underneath your body. Notice how long it takes to perform this and the momentum generated. Now, get back into that position once more, and this time bring your foot up underneath in one quick motion; imagine kicking a target underneath your butt. It was only a fraction of a second quicker but much stronger. The amount of force applied to the ground will change the amount of hip flexion, assuming the runner is reasonably flexible, because of the stretch reflex. The stronger the force applied, the more flexed the hips will be; this is why 100-meter sprinters appear to run with “high knees.”
Most importantly, POSE reminds runners to just let it happen. If the body is strong enough and the motor patterns are well trained, everything just happens; the stretch-shortening cycle, the forward motion, the leg cycling, and all the other good mechanics of running. Often runners think of too many things to do at once. The mind can only process so many thoughts and perform so many actions at a time. Professional track athletes think nothing of form during a race; they allow the race happen and think about one thing, typically about running their own race. These athletes have drilled the form in their head and bodies at practice; what used to take dedicated effort to perform is now second nature. To quote Romanov, “Problems begin when we insist on controlling every aspect of our body moving… While we think about what we need to do to move our leg this way or that way and we think of what muscles should be working, our body and its constituent parts have already not only activated the necessary muscles, but might have already finished the job, too.”
Analyzing POSE
Proper running form has been known since before Romanov introduced the POSE method. Gordon Pirie describes proper running technique in Running Fast and Injury Free in a very similar manner as Romanov. He touches on being light and springy, “landing elastically on the forefoot with a flexed knee (thus producing quiet feet). On landing, the foot should be directly below the body,” and so on. Sound familiar? Romanov coined a teaching style. Just as there are several ways to learn how to do a back-handspring in gymnastics or clean a weight, there are several ways to teach a person how to run. The end result is essentially always the same; the teaching of such skills varies from coach to coach. Also, certain descriptions and teaching methods work better for one person than another. POSE’s teaching method may not work for everyone. If running coaches can take anything away from the POSE method, it is that they should remind their athletes to let running happen. Drills done in practice are meant to create muscle memory so athletes do not have to think while competing, over thinking results in performance loss.
Runners often experience much ankle and calf pain once taking up POSE running. Romanov states that this is the result of the person “resisting gravity” and “tensing of the calves.” As a quick fix, he says to focus on relaxing the foot on the support phase. This is good advice, but there are two problems. Firstly, many people who take up POSE are recreational runners who tend to have tight calf muscles and ankles to begin with, carry-overs from heel-toe running. So when running on the ball of the foot, these muscles are now stretched with forces exceeding three times bodyweight. This will cause slight tears and strains from repeated use. Secondly, running on the ball of the foot and utilizing the stretch-shortening reflex results in much more eccentric work being done by the lower legs. Eccentric movements are known to cause more muscle damage than concentric because the muscles are under greater tension. Now that the ankles and calves are supporting greater forces, the risk for tears is higher. It is obvious that adjusting running technique requires an adjustment of the training program as well. The body must be allowed time to adapt to the new stresses and demands, no matter the quality of the coaching.
Romanov touts that in order to run faster, all the athlete needs to do is lean more (displace COG) and pick up the cadence (change support quickly). Gravity is the “engine” that allows one to run and sprint faster and that muscular power and effort is of less importance. He states that because the contact time with the ground is so short that muscular strength cannot be expressed, even though the muscles contract once they are stretched. Romanov even cites a study linking muscular contractions in the quadriceps having insignificant input to running. Through this study Romanov concludes that there is no “push off” in running because the quads are mostly inactive in a stride. Voluntary push off is apparently nonexistent. However, this study analyzes the knee extension of the running stride and not the hip extension, which is where the “push off” comes from, or rather the “push forward.” Running is about extending the hips and not the knees.
The biggest issue is the role of the hamstrings. POSE states that they are the only active component of running and their function is to pull the foot off the ground. Movement is caused by gravity alone and simply changing support at a faster pace results in faster running speeds. That is a great idea to have while running but you will not be a fast runner by just changing support quickly. You have to use the leg muscles to the best of their ability. Muscles are not meant to store large amounts of energy; they do a much better job at producing it. Here’s a good analogy. Place two cars of the same model on a slight downhill. The downhill represents the forward lean of the body. Car A represents the POSE runner and will travel down the road by “gravity alone” while car B represents another runner with good mechanics and utilizing his leg muscles. At the start of the race A is shifted into neutral while B is shifted into drive and the pedal is pressed to the floor. A gradually picks up speed and tops out around several miles per hour while B has taken off into the sunset. POSE is an efficient way of learning to run, but not the best way to run. You can run utilizing all of POSE’s concepts to the maximum, but in order to win the race you will have to run hard and use energy; you must use your internal engine. Muscular power must be exerted in order to run fast and run personal bests. No runner crosses the finish line without exerting most of their energy to win and run personal bests.
Regarding the lean, the human body can only lean so far before balance is completely destroyed and the runner lands on his or her face. The runner leans in order to effectively push against the ground, not chase their COG. Often when a runner attempts to pick up speed, he or she will over-stride or will thrust the leg to the ground. As stated before, thrusting the leg down to the ground results in greater forces generated in the legs, and almost definitely longer contact times. When over-striding, the runner will not only land ahead of the COG, but also create higher breaking forces by landing closer to the heel if not on the heel with straight leg. The runner must drag himself forward in order to position himself in the proper pushing position. Runners do not want to reach out with their legs but rather create a “piston-type” movement. This allows runners to run most effectively because they are striking the ground in the perfect position to push off. In a perfect world this is the most efficient way to run.
Also, the body can only take so many steps per second; in order to cover more distance there must be more power produced. Elite 100-meter sprinters take approximately 50 or fewer steps to complete the race—around 5 steps per second—but even average runners can achieve a cadence matching those of high-end level sprinters. The only difference is the amount of distance that is covered between the two runners.
In order for the elite sprinter to cover 100 meters in such a short time, there must be more distance covered per stride. A study by Dr. Peter Weyand at Harvard showed that force production per stride results in higher top speeds. Additionally, the higher the force applied the shorter the contact time, regardless of maximal speed. Power separates the great from the average. The more powerful athlete will always win in a sprint because the leg muscles are able to generate greater force against the ground. This athlete can generate a greater percentage of their max strength in the short time of contact. The greater this power is in relation to bodyweight, the more distance covered per stride.
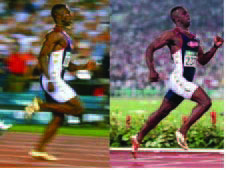

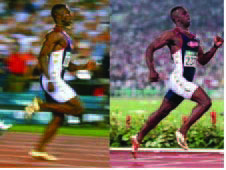
For example, examine the dip of the jerk and the support phase of Michael Johnson’s stride in these two frames. With the dip of the movement, the body assumes the same position as the support phase. The hips, knees, and ankles are all flexed and loaded. There is minimal flexion in this position. Any more flexion reduces the effect of the stretch-shortening cycle because the muscle contraction is delayed; energy will be released as heat if the change from eccentric to concentric is not immediate. The faster application of power allows the weight being heaved or Johnson moving forward. If the weightlifter were to slowly apply his force, the lift would be a missed attempt, and if Johnson were to not quickly apply force he would not have any world records.
In the next frame the legs are in triple extension. Here the body exerts maximal force against the ground, resulting in a heavy load being heaved and Johnson’s bodyweight propelled forward. The difference is the positioning of the bodies. Because Johnson is positioned a few degrees forward, the force generated by his legs drives him forward, while the weightlifter is as vertical as possible so the force generated drives the weight upward. One must note that the more powerful the muscles, the more powerful the stretch-shortening cycle, and therefore the faster the running. Form and technique aside, the most powerful will always win.
The problem with Romanov’s assumptions is that running (more specifically sprinting) is about displaying maximal strength, which takes at least .4 second to achieve peak force development, when in fact, sprinting is a runner’s attempt to express explosive strength. Athletes are constantly attempting to improve their explosive strength in order to gain the edge needed in sport. POSE running overlooks the importance of rate of force development and its application to running faster. Also, runners never exceed a lean of more than a few degrees (except for a sprinter coming out of the blocks), so greater leans do not necessarily translate into greater max speeds. Maximal strength is the key for force development but because of the short contact time maximal force cannot be expressed with each stride. Trying to exert maximal strength against the ground results in a longer than wanted or needed contact time, and the person you race against could be two or three strides ahead now, just as the weightlifter has to quickly drive out of the very brief dip in order to drive weight overhead. To solve this problem, the runner must be able to condition the muscles to increase the rate of force development. By training to increase the rate of force development, the athlete will increase the amount power in each stride and therefore distance traveled.
It’s the Shoes
The average person fails to run with proper form because of being misinformed and having the luxury of cushioned running shoes; even current track coaches often fail to instruct running form well because of shoes. This trend started in the 1960s and 1970s when running started to become popular among recreational athletes. The shoes worn by elite runners such as Roger Bannister (top), Jesse Owens, Michael Johnson (middle), and Haile Gebrselassie (bottom) were nothing more than a protective slipper, in stark contrast to the modern, stylish shoes of today with all the padding in the world to “protect” the feet and “correct” running issues. If the average person attempted to run wearing these slippers or even barefoot, the first thing that would happen is they would strike with the heel and send a shooting pain up their leg. In order to prevent such pain while running barefoot or in these thin shoes, one learned to run properly. Besides Johnson, all these runners grew up running with lightly cushioned shoes or even barefoot, resulting in excellent running form, and few injuries, all because a thin protective layer separated the foot from the ground. These light shoes allow the body to apply the power needed during runs while reinforcing proper technique with each stride. Thick, soft heels disperse this energy.
Modern running shoes change the athlete’s mechanics with each stride unless he or she is conscious of form or has correct mechanics ingrained in his or her muscles, but even then “to run in shoes was OK… it's better to have no shoes than not the right ones,” to quote Gebrselassie. Shoes tend to be designed in labs based on testing and observation of the average person, who lacks correct running technique. This runner strikes heel to toe, landing with a fully extended leg, and pounds the ground or shuffles along amiably. Take a look at recreational runners at a park, and you’ll find that 99% of them run in such a manner; the shoes promote terrible form by allowing people to run poorly.

Look at track flats or racing spikes and see that there is extremely little padding, and that the spike plate is on the midfoot rather than the heel. That ought to tell you something about how you should run. To quote Gordon Pirie, “Instead of looking for padding, learn to run properly, so that you stop punching holes in the ground with your feet… I have run more than 240,000 miles without any major problems, and more than half that distance covered on so-called hard pavement.” The problem lies in the widespread ignorance of the running community and shoe companies promoting products that allow improper technique.
Conclusion
POSE running shatters the average person’s notions of how to run, claiming to be “first official and complete running technique on the market” and that it cures “running related problems” such as shin splints, plantar fascitis, knee and hip issues, and other similar types of injuries. For years track and field coaches have known the proper mechanics of running, and good coaches and experienced runners implement much skill work into their training; Romanov simply invented his own method of coaching proper form, just as Dan John’s method for teaching the snatch is different from Mike Burgener’s method. However, the end result will look the same. What goes through the athletes’ minds will differ.
Romanov is correct in stating that running is a learned skill, and POSE is a good teaching method because it is very simple to teach. No weightlifter just does snatches in order to practice, just as no runner just runs in order to practice. There are drills that are done in each session that aid in the development and perfection of skill. However, one must keep in mind that POSE is a method of teaching proper running mechanics and not its own biomechanical model of running. It is simply one method of learning the proper mechanics of a technical skill.
References
Chu, Donald. Jumping into Plyometrics. Champaign: Human Kinetics, 1998.
CNN. “Q & A with Haile Gebrselassie.” November 9. 2007. Retrieved April 24, 2008 from http://www.cnn.com
Ebbets, R. The Art of Running. Retrieved May 18, 2008, from http://www.texastrack.com/
Farrell, J. STRIDE LENGTH ANALYSIS. Retrieved May 18, 2008, from http://www.coachr.org/
Newton, R. The Great Stretch Shortening Cycle Debate - Why is a counter movement jump higher than a concentric only jump. Retrieved May 18, 2008, from http://www.innervations.com/
McGinnis, Peter M. Biomechanics of Sport and Exercise. Champaigne: Human Kinetics, 2005.
Pirie, Gordon. Running Fast and Injury Free. Ed. John S. Gilbody. John S Gilbody, 1996. Gordon Pirie Resource Center. <http://www.gordonpirie.com/>.
Romanov, Nicholas. Dr. Nicholas Romanov's POSE Method of Running. CoralGables: POSE Tech Press, 2002.
Romanov, Nicholas. Dr. Nicholas Romanov's Training Essays Volume I. Coral Gables: POSE Tech Press, 2006.
Romanov, Nicholas. "THE EXTENSOR PARADOX IN RUNNING." November 1, 2005. Retrieved April 24, 2008 from http://www.POSEtech.com/
Romanov, Nicholas. "FAST RUNNING with POSE Method." May 30, 2006. Retrieved April 24, 2008 from http://www.POSEtech.com/
Smith, Mike. High Performance Sprinting. Ramsbury: Crowood, 2005.
Weyand, P.G., Sternligh, D.B., Bellizzi, M.J., & Wright, S. (2000). “Faster top running speeds are achieved with greater ground forces not more rapid leg movements.” Retrieved April 24, 2008 from Journal of Applied Physiology, 89 <http://jap.physiology.org/cgi/content/full/89/5/1991.>
Zatsiorsky, Vladimir M., and William J. Kraemer. Science and Practice of Strength Training. Champaign: Human Kinetics, 2006.
This has brought new attention to recreational and long distance running mechanics, which have devolved over the years since the advent of recreational running and the “innovative” running shoe that has resulted in misinformation. While the POSE method is functional for longer distances, its mechanics fail to meet the demands of sprinting.
Analyzing the Stride
Each stride of a run, whether it is the mile or the 100 meter dash, has three components: the support, the drive, and the recovery phase. All three phases occur within fractions of seconds and in quick, fluid succession.
In the support phase, one leg begins contact with the ground from the ball of the foot while the other is free and behind the body. The leg that is in contact with the ground remains underneath or slightly ahead of the center of gravity (COG) and flexes as it bears bodyweight, initiating a stretch-shortening cycle. The free leg is now in the process of swinging forward and the drive phase begins. The contact foot has now been loaded like a spring in the support phase and begins to extend from the ankles, knees, and hips. This action propels the body forward. The free leg, at the same time, is swung forward in order to add to forward propulsion. This push places the runner’s body in the air and there is now no contact with the ground. This completes the drive phase. The recovery phase is when the body is airborne and the legs begin to cycle and change positions. The free leg, which had been driven upward, now begins to “unwind” and make its way down to the ground. Once it makes contact with the ground, the support phase begins all over again. What strides look like will vary from runner to runner and from distance to distance, but the basic components always remain the same.
POSE encourages running economy with its principle mental cues. These principles tell runners to “change support quickly… raise the ankle straight up under the hips… retain the support easily, effortlessly, light… to not try to increase stride length or range of motion to increase speed… to not fix on landing… [and] keep the knees bent on landing.” All of these mental cues aid in achieving proper running mechanics. Many are the same points that track and field coaches use for their athletes.
The first step of the stride is the landing of the foot. Romanov reminds the runner to not fixate on getting the leg back down to the support phase in order to run faster. To run faster, one is covering more ground with each stride, not reaching for the ground ahead (resulting in overstriding). The runner allows the free leg to naturally drop to the ground rather than returning it by mechanical energy. Doing so, the runner prevents himself or herself from stomping the ground. A good runner does not run with “heavy feet,” (caused by actively reaching the ground), but rather the steps are quick and light; there is only a light pitter-pat to each stride. If the foot stomps the ground, tremendous forces are sent upwards through the legs; these forces are much greater than what results if just allowing gravity to bring the foot back down. Also, actively reaching and stomping the ground reduces the hang time of a stride, which reduces the amount of distance covered.
Romanov states that with each stride the foot land—while keeping the knee bent—on the ball of the foot underneath the center of gravity, which is being displaced in a forward direction. Landing on the ball of the foot and under the center of gravity reduces the braking action, keeping the runner in motion. This landing also allows the lower legs to absorb impact much better than heel-toe running—the calf muscles are allowed to flex and absorb force. Landing on the ball of the foot and with flexed knees utilizes the stretch-shortening cycle, unlike heel-toe running, where the leg muscles are already in a stretched position, and must therefore generate more force to “toe off.” The stretch-shortening cycle causes a recoil effect in the leg muscles, and the runner is able to use the body’s natural reflexes in order to contribute power, resulting in more economical movement. The calf and hip muscles strike the ground in a semi-flexed position, immediately stretch, and contract, resulting in momentum forward only if there is a forward lean.
The runner’s COG is displaced forward by leaning slightly from the ankles to facilitate forward motion by placing the runner’s legs at the proper angle to push against the ground. If the lean is not present, the leg drive is straight down and propulsion is upwards. In order to move, the runner must “drag” the body across the ground or bounce, resulting in higher energy expenditure. Think of pushing a car. If you stand completely upright and try to push a car forward it will go nowhere. The body is not in a position to push against the ground or the weight of the car. However, if the body is angled only a few degrees then the legs can effectively push against the ground and move the vehicle.
POSE tells the runner to pull the ankle straight up instead of backwards in a pawing motion. This mental cue results in two things: a more efficient use of hip and knee flexion and a quicker change of support. This quicker change of support is important in running to ensure the entire system (the runner) is in constant motion and never decelerating due to the braking effect of remaining in contact with the ground for too long.
The reason it is more efficient to pull the foot straight up is because the runner performs the knee and hip flexion as one motion rather than as two separate motions. For example, stand on one leg with the free leg extended behind you, ball of the foot lightly touching the floor. Now, as fast as possible kick yourself in the butt and bring your foot underneath your body. Notice how long it takes to perform this and the momentum generated. Now, get back into that position once more, and this time bring your foot up underneath in one quick motion; imagine kicking a target underneath your butt. It was only a fraction of a second quicker but much stronger. The amount of force applied to the ground will change the amount of hip flexion, assuming the runner is reasonably flexible, because of the stretch reflex. The stronger the force applied, the more flexed the hips will be; this is why 100-meter sprinters appear to run with “high knees.”
Most importantly, POSE reminds runners to just let it happen. If the body is strong enough and the motor patterns are well trained, everything just happens; the stretch-shortening cycle, the forward motion, the leg cycling, and all the other good mechanics of running. Often runners think of too many things to do at once. The mind can only process so many thoughts and perform so many actions at a time. Professional track athletes think nothing of form during a race; they allow the race happen and think about one thing, typically about running their own race. These athletes have drilled the form in their head and bodies at practice; what used to take dedicated effort to perform is now second nature. To quote Romanov, “Problems begin when we insist on controlling every aspect of our body moving… While we think about what we need to do to move our leg this way or that way and we think of what muscles should be working, our body and its constituent parts have already not only activated the necessary muscles, but might have already finished the job, too.”
Analyzing POSE
Proper running form has been known since before Romanov introduced the POSE method. Gordon Pirie describes proper running technique in Running Fast and Injury Free in a very similar manner as Romanov. He touches on being light and springy, “landing elastically on the forefoot with a flexed knee (thus producing quiet feet). On landing, the foot should be directly below the body,” and so on. Sound familiar? Romanov coined a teaching style. Just as there are several ways to learn how to do a back-handspring in gymnastics or clean a weight, there are several ways to teach a person how to run. The end result is essentially always the same; the teaching of such skills varies from coach to coach. Also, certain descriptions and teaching methods work better for one person than another. POSE’s teaching method may not work for everyone. If running coaches can take anything away from the POSE method, it is that they should remind their athletes to let running happen. Drills done in practice are meant to create muscle memory so athletes do not have to think while competing, over thinking results in performance loss.
Runners often experience much ankle and calf pain once taking up POSE running. Romanov states that this is the result of the person “resisting gravity” and “tensing of the calves.” As a quick fix, he says to focus on relaxing the foot on the support phase. This is good advice, but there are two problems. Firstly, many people who take up POSE are recreational runners who tend to have tight calf muscles and ankles to begin with, carry-overs from heel-toe running. So when running on the ball of the foot, these muscles are now stretched with forces exceeding three times bodyweight. This will cause slight tears and strains from repeated use. Secondly, running on the ball of the foot and utilizing the stretch-shortening reflex results in much more eccentric work being done by the lower legs. Eccentric movements are known to cause more muscle damage than concentric because the muscles are under greater tension. Now that the ankles and calves are supporting greater forces, the risk for tears is higher. It is obvious that adjusting running technique requires an adjustment of the training program as well. The body must be allowed time to adapt to the new stresses and demands, no matter the quality of the coaching.
Romanov touts that in order to run faster, all the athlete needs to do is lean more (displace COG) and pick up the cadence (change support quickly). Gravity is the “engine” that allows one to run and sprint faster and that muscular power and effort is of less importance. He states that because the contact time with the ground is so short that muscular strength cannot be expressed, even though the muscles contract once they are stretched. Romanov even cites a study linking muscular contractions in the quadriceps having insignificant input to running. Through this study Romanov concludes that there is no “push off” in running because the quads are mostly inactive in a stride. Voluntary push off is apparently nonexistent. However, this study analyzes the knee extension of the running stride and not the hip extension, which is where the “push off” comes from, or rather the “push forward.” Running is about extending the hips and not the knees.
The biggest issue is the role of the hamstrings. POSE states that they are the only active component of running and their function is to pull the foot off the ground. Movement is caused by gravity alone and simply changing support at a faster pace results in faster running speeds. That is a great idea to have while running but you will not be a fast runner by just changing support quickly. You have to use the leg muscles to the best of their ability. Muscles are not meant to store large amounts of energy; they do a much better job at producing it. Here’s a good analogy. Place two cars of the same model on a slight downhill. The downhill represents the forward lean of the body. Car A represents the POSE runner and will travel down the road by “gravity alone” while car B represents another runner with good mechanics and utilizing his leg muscles. At the start of the race A is shifted into neutral while B is shifted into drive and the pedal is pressed to the floor. A gradually picks up speed and tops out around several miles per hour while B has taken off into the sunset. POSE is an efficient way of learning to run, but not the best way to run. You can run utilizing all of POSE’s concepts to the maximum, but in order to win the race you will have to run hard and use energy; you must use your internal engine. Muscular power must be exerted in order to run fast and run personal bests. No runner crosses the finish line without exerting most of their energy to win and run personal bests.
Regarding the lean, the human body can only lean so far before balance is completely destroyed and the runner lands on his or her face. The runner leans in order to effectively push against the ground, not chase their COG. Often when a runner attempts to pick up speed, he or she will over-stride or will thrust the leg to the ground. As stated before, thrusting the leg down to the ground results in greater forces generated in the legs, and almost definitely longer contact times. When over-striding, the runner will not only land ahead of the COG, but also create higher breaking forces by landing closer to the heel if not on the heel with straight leg. The runner must drag himself forward in order to position himself in the proper pushing position. Runners do not want to reach out with their legs but rather create a “piston-type” movement. This allows runners to run most effectively because they are striking the ground in the perfect position to push off. In a perfect world this is the most efficient way to run.
Also, the body can only take so many steps per second; in order to cover more distance there must be more power produced. Elite 100-meter sprinters take approximately 50 or fewer steps to complete the race—around 5 steps per second—but even average runners can achieve a cadence matching those of high-end level sprinters. The only difference is the amount of distance that is covered between the two runners.
In order for the elite sprinter to cover 100 meters in such a short time, there must be more distance covered per stride. A study by Dr. Peter Weyand at Harvard showed that force production per stride results in higher top speeds. Additionally, the higher the force applied the shorter the contact time, regardless of maximal speed. Power separates the great from the average. The more powerful athlete will always win in a sprint because the leg muscles are able to generate greater force against the ground. This athlete can generate a greater percentage of their max strength in the short time of contact. The greater this power is in relation to bodyweight, the more distance covered per stride.
For example, examine the dip of the jerk and the support phase of Michael Johnson’s stride in these two frames. With the dip of the movement, the body assumes the same position as the support phase. The hips, knees, and ankles are all flexed and loaded. There is minimal flexion in this position. Any more flexion reduces the effect of the stretch-shortening cycle because the muscle contraction is delayed; energy will be released as heat if the change from eccentric to concentric is not immediate. The faster application of power allows the weight being heaved or Johnson moving forward. If the weightlifter were to slowly apply his force, the lift would be a missed attempt, and if Johnson were to not quickly apply force he would not have any world records.
In the next frame the legs are in triple extension. Here the body exerts maximal force against the ground, resulting in a heavy load being heaved and Johnson’s bodyweight propelled forward. The difference is the positioning of the bodies. Because Johnson is positioned a few degrees forward, the force generated by his legs drives him forward, while the weightlifter is as vertical as possible so the force generated drives the weight upward. One must note that the more powerful the muscles, the more powerful the stretch-shortening cycle, and therefore the faster the running. Form and technique aside, the most powerful will always win.
The problem with Romanov’s assumptions is that running (more specifically sprinting) is about displaying maximal strength, which takes at least .4 second to achieve peak force development, when in fact, sprinting is a runner’s attempt to express explosive strength. Athletes are constantly attempting to improve their explosive strength in order to gain the edge needed in sport. POSE running overlooks the importance of rate of force development and its application to running faster. Also, runners never exceed a lean of more than a few degrees (except for a sprinter coming out of the blocks), so greater leans do not necessarily translate into greater max speeds. Maximal strength is the key for force development but because of the short contact time maximal force cannot be expressed with each stride. Trying to exert maximal strength against the ground results in a longer than wanted or needed contact time, and the person you race against could be two or three strides ahead now, just as the weightlifter has to quickly drive out of the very brief dip in order to drive weight overhead. To solve this problem, the runner must be able to condition the muscles to increase the rate of force development. By training to increase the rate of force development, the athlete will increase the amount power in each stride and therefore distance traveled.
It’s the Shoes
The average person fails to run with proper form because of being misinformed and having the luxury of cushioned running shoes; even current track coaches often fail to instruct running form well because of shoes. This trend started in the 1960s and 1970s when running started to become popular among recreational athletes. The shoes worn by elite runners such as Roger Bannister (top), Jesse Owens, Michael Johnson (middle), and Haile Gebrselassie (bottom) were nothing more than a protective slipper, in stark contrast to the modern, stylish shoes of today with all the padding in the world to “protect” the feet and “correct” running issues. If the average person attempted to run wearing these slippers or even barefoot, the first thing that would happen is they would strike with the heel and send a shooting pain up their leg. In order to prevent such pain while running barefoot or in these thin shoes, one learned to run properly. Besides Johnson, all these runners grew up running with lightly cushioned shoes or even barefoot, resulting in excellent running form, and few injuries, all because a thin protective layer separated the foot from the ground. These light shoes allow the body to apply the power needed during runs while reinforcing proper technique with each stride. Thick, soft heels disperse this energy.
Modern running shoes change the athlete’s mechanics with each stride unless he or she is conscious of form or has correct mechanics ingrained in his or her muscles, but even then “to run in shoes was OK… it's better to have no shoes than not the right ones,” to quote Gebrselassie. Shoes tend to be designed in labs based on testing and observation of the average person, who lacks correct running technique. This runner strikes heel to toe, landing with a fully extended leg, and pounds the ground or shuffles along amiably. Take a look at recreational runners at a park, and you’ll find that 99% of them run in such a manner; the shoes promote terrible form by allowing people to run poorly.
Look at track flats or racing spikes and see that there is extremely little padding, and that the spike plate is on the midfoot rather than the heel. That ought to tell you something about how you should run. To quote Gordon Pirie, “Instead of looking for padding, learn to run properly, so that you stop punching holes in the ground with your feet… I have run more than 240,000 miles without any major problems, and more than half that distance covered on so-called hard pavement.” The problem lies in the widespread ignorance of the running community and shoe companies promoting products that allow improper technique.
Conclusion
POSE running shatters the average person’s notions of how to run, claiming to be “first official and complete running technique on the market” and that it cures “running related problems” such as shin splints, plantar fascitis, knee and hip issues, and other similar types of injuries. For years track and field coaches have known the proper mechanics of running, and good coaches and experienced runners implement much skill work into their training; Romanov simply invented his own method of coaching proper form, just as Dan John’s method for teaching the snatch is different from Mike Burgener’s method. However, the end result will look the same. What goes through the athletes’ minds will differ.
Romanov is correct in stating that running is a learned skill, and POSE is a good teaching method because it is very simple to teach. No weightlifter just does snatches in order to practice, just as no runner just runs in order to practice. There are drills that are done in each session that aid in the development and perfection of skill. However, one must keep in mind that POSE is a method of teaching proper running mechanics and not its own biomechanical model of running. It is simply one method of learning the proper mechanics of a technical skill.
References
Chu, Donald. Jumping into Plyometrics. Champaign: Human Kinetics, 1998.
CNN. “Q & A with Haile Gebrselassie.” November 9. 2007. Retrieved April 24, 2008 from http://www.cnn.com
Ebbets, R. The Art of Running. Retrieved May 18, 2008, from http://www.texastrack.com/
Farrell, J. STRIDE LENGTH ANALYSIS. Retrieved May 18, 2008, from http://www.coachr.org/
Newton, R. The Great Stretch Shortening Cycle Debate - Why is a counter movement jump higher than a concentric only jump. Retrieved May 18, 2008, from http://www.innervations.com/
McGinnis, Peter M. Biomechanics of Sport and Exercise. Champaigne: Human Kinetics, 2005.
Pirie, Gordon. Running Fast and Injury Free. Ed. John S. Gilbody. John S Gilbody, 1996. Gordon Pirie Resource Center. <http://www.gordonpirie.com/>.
Romanov, Nicholas. Dr. Nicholas Romanov's POSE Method of Running. CoralGables: POSE Tech Press, 2002.
Romanov, Nicholas. Dr. Nicholas Romanov's Training Essays Volume I. Coral Gables: POSE Tech Press, 2006.
Romanov, Nicholas. "THE EXTENSOR PARADOX IN RUNNING." November 1, 2005. Retrieved April 24, 2008 from http://www.POSEtech.com/
Romanov, Nicholas. "FAST RUNNING with POSE Method." May 30, 2006. Retrieved April 24, 2008 from http://www.POSEtech.com/
Smith, Mike. High Performance Sprinting. Ramsbury: Crowood, 2005.
Weyand, P.G., Sternligh, D.B., Bellizzi, M.J., & Wright, S. (2000). “Faster top running speeds are achieved with greater ground forces not more rapid leg movements.” Retrieved April 24, 2008 from Journal of Applied Physiology, 89 <http://jap.physiology.org/cgi/content/full/89/5/1991.>
Zatsiorsky, Vladimir M., and William J. Kraemer. Science and Practice of Strength Training. Champaign: Human Kinetics, 2006.
|
Brian DeGennaro is a student at Syracuse University, studying Health and Exercise Science and continuing as a track and field athlete, recently adding gymnastics and weightlifting as well. Brian has learned extraordinary amounts of information from working with professionals in sports medicine, track, gymnastics, weightlifting and through coaching youth track and members of CrossfitNYC. |
Search Articles
Article Categories
Sort by Author
Sort by Issue & Date
Article Categories
Sort by Author
Sort by Issue & Date